【ポスター概要】 ASV(洋上自律探査機)は水面を自律的に移動することができる無人機です。搭載されたセンサー類で港湾施設や橋梁施設等を水面から調査したり、水中のROVと連携して作業を行うなど、水域における産業活動のスマート化に資する技術として期待を集めています。 東京海洋大学の研究者らは、汎用調査を目的とした小型ASV「μASV」を開発した。μASVは水中ロボットのASV化というコンセプトで設計を行うことにより小型化を実現した。各種センサー(位置系、回転系)を搭載し、メインスラスタ(並進系)とバウスラスタ(回転系)からなる船体モデルの制御方式を開発し、ウェイポイント制御による自律航行システムの試験に成功した。
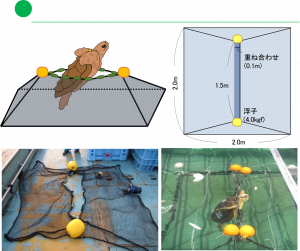
【今後の展望】 湖や沿岸部で養殖の水質調査・監視、網やアンカーの点検、放射能汚染地域の調査などの用途を想定し、企業との共同研究を行いたいと考えている
【本件に関わる本学研究者】 田原淳一郎、小池雅和
【技術分野】 航行制御システム
【キーワード】 ASV、ウェイポイント航行システム、スマート化
【関係する主な研究財源】
・造船学術研究推進機構平成30年度交付研究テーマ採択
・東京海洋大学学長裁量経費
お問合せ先は、東京海洋大学産学・地域連携推進機構の技術相談受付システム「海の技術相談室」をご利用ください。
【関係する研究開発活動】
・国土交通省海の次世代モビリティの利活用に関する実証事業令和3年度採択「小型ASVを用いたウニ密度マップによる効率的な駆除方法の検討」
- 展示会等でのポスター出展
- 2021年11月 アグリビジネス創出フェア2021 スマート農林水産業-みどりの食料システム戦略の実現に向けて-
- 2022年11月 アグリビジネス創出フェア2022『産学官連携イノベーション』~スタートアップ創出元年~